1. विभिन्न संरचनात्मक सिद्धांत
दो मॉडलों के डिजाइन सिद्धांत अलग हैं, जिसके परिणामस्वरूप झुकने वाले स्लाइडर के दोनों किनारों पर सिंक्रनाइज़ेशन सुनिश्चित करने के लिए विभिन्न संरचनाएं होती हैं। मरोड़ अक्ष झुकने वाली मशीन एक मरोड़ अक्ष का उपयोग करती है ताकि बाएं और दाएं स्विंग रॉड को एक मरोड़ अक्ष बनाने के लिए दोनों तरफ सिलेंडरों को ऊपर और नीचे ले जाने के लिए एक सिंक्रनाइज़ेशन तंत्र को मजबूर किया जा सके, इसलिए टोरसन अक्ष सिंक्रनाइज़ेशन झुकने मशीन एक यांत्रिक मजबूर सिंक्रनाइज़ेशन विधि है। , और स्लाइडर की समानता को स्वचालित रूप से स्वचालित मध्यस्थता की जाँच नहीं की जा सकती है।
इलेक्ट्रो-हाइड्रोलिक सिंक्रोनस झुकने वाली मशीन स्लाइडर और दीवार प्लेट पर एक चुंबकीय (ऑप्टिकल) स्केल स्थापित करना है। संख्यात्मक नियंत्रण प्रणाली किसी भी समय चुंबकीय (ऑप्टिकल) पैमाने की प्रतिक्रिया जानकारी के माध्यम से स्लाइडर के दोनों किनारों के सिंक्रनाइज़ेशन का विश्लेषण कर सकती है। यदि कोई त्रुटि है, तो संख्यात्मक नियंत्रण प्रणाली स्लाइडर के दोनों किनारों पर स्ट्रोक को सिंक्रनाइज़ करने के लिए आनुपातिक इलेक्ट्रो-हाइड्रोलिक सर्वो वाल्व के माध्यम से समायोजित करेगी। न्यूमेरिकल कंट्रोल सिस्टम, हाइड्रोलिक कंट्रोल वाल्व ग्रुप और मैग्नेटिक स्केल इलेक्ट्रो-हाइड्रोलिक सिंक्रोनस बेंडिंग मशीन के फीडबैक क्लोज्ड-लूप कंट्रोल का गठन करते हैं।

2. प्रेसिजन
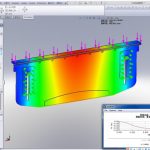
स्लाइडर की समांतरता वर्कपीस के कोण को निर्धारित करती है। मरोड़ अक्ष तुल्यकालिक झुकने वाली मशीन यांत्रिक रूप से वास्तविक समय त्रुटि प्रतिक्रिया के बिना, स्लाइडर के सिंक्रनाइज़ेशन को बनाए रखती है, और मशीन स्वयं स्वचालित समायोजन नहीं कर सकती है। इसके अलावा, इसकी आंशिक भार क्षमता खराब है (टोरसन अक्ष सिंक्रोनस झुकने वाली मशीन सिंक्रोनाइज़ेशन तंत्र को सिलेंडर को ऊपर और नीचे दोनों तरफ ले जाने के लिए मजबूर करने के लिए मरोड़ अक्ष का उपयोग करती है। यदि लंबी अवधि के आंशिक भार के कारण मरोड़ अक्ष ख़राब हो जाएगा) ।), इलेक्ट्रो-हाइड्रोलिक सिंक्रोनस बेंडिंग मशीन आनुपातिक इलेक्ट्रिक के माध्यम से एक प्रणाली है। तरल वाल्व समूह स्लाइडर सिंक्रनाइज़ेशन को नियंत्रित करता है, और चुंबकीय (ऑप्टिकल) स्केल रीयल-टाइम त्रुटि प्रतिक्रिया प्रदान करता है। यदि कोई त्रुटि है, तो सिस्टम स्लाइडर के सिंक्रनाइज़ेशन को बनाए रखने के लिए आनुपातिक वाल्व के माध्यम से समायोजित करेगा।
3. गति
मशीन के काम में दो बिंदु होते हैं जो इसकी चलने की गति निर्धारित करते हैं: (1) स्लाइडर गति, (2) बैकगेज गति, (3) झुकने की गति।
टॉर्सियन एक्सिस सिंक्रोनस बेंडिंग मशीन 6:1 या 8:1 सिलेंडर का उपयोग करती है, जो धीमा है, जबकि इलेक्ट्रो-हाइड्रोलिक सिंक्रोनस बेंडिंग मशीन 13:1 या 15:1 सिलेंडर का उपयोग करती है, जो तेज है। इसलिए, इलेक्ट्रो-हाइड्रोलिक सिंक्रोनस बेंडिंग मशीन की फास्ट डाउन स्पीड और रिटर्न स्पीड मरोड़ सिंक्रोनस बेंडिंग मशीन की तुलना में बहुत अधिक है।
जब टॉर्सियन एक्सिस सिंक्रोनस झुकने वाली मशीन का स्लाइडर नीचे की ओर बढ़ता है, हालांकि गति में तेजी से नीचे और धीमी गति के कार्य होते हैं, तेजी से नीचे और वापसी की गति केवल 80 मिमी / सेकंड होती है, और तेज और धीमी स्विचिंग चिकनी नहीं होती है। बैकगेज की रनिंग स्पीड केवल 100mm/s है।
यदि वर्कपीस को कई चरणों में मोड़ने की आवश्यकता है, तो मरोड़ अक्ष तुल्यकालिक झुकने मशीन की प्रत्येक प्रक्रिया को अलग से सेट किया जाना चाहिए, और प्रसंस्करण प्रक्रिया बहुत बोझिल है। हालांकि, इलेक्ट्रो-हाइड्रोलिक सिंक्रोनस मशीन कंप्यूटर के माध्यम से प्रत्येक चरण की प्रक्रिया को सेट और सहेज सकती है, और इसे लगातार संचालित किया जा सकता है, जो झुकने वाले कदम की गति में काफी सुधार करता है और कार्य कुशलता में सुधार करता है।
जब इलेक्ट्रो-हाइड्रोलिक सिंक्रोनस झुकने वाली मशीन का स्लाइडर नीचे चला जाता है, तो गति में तेजी से नीचे और धीमा होने का कार्य होता है। तेजी से नीचे और वापसी की गति 200 मिमी / एस तक पहुंच सकती है, और तेज और धीमी रूपांतरण चिकनी है, जो उत्पादन क्षमता में काफी सुधार कर सकती है। उसी समय, बैकगेज की गति 300 मिमी / सेकंड तक पहुंच जाती है।
4. ताकत
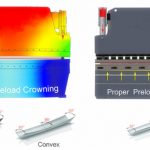
अपने स्वयं के डिजाइन के कारण, मरोड़ तुल्यकालिक झुकने वाली मशीन सनकी भार के तहत झुक नहीं सकती है। यदि यह लंबे समय तक सनकी भार के नीचे झुकता है, तो यह मरोड़ शाफ्ट को विकृत कर देगा। इलेक्ट्रो-हाइड्रोलिक सिंक्रोनस सीएनसी झुकने वाली मशीन में ऐसी कोई समस्या नहीं है। बाईं और दाईं ओर Y1 और Y2 कुल्हाड़ियां स्वतंत्र रूप से काम करती हैं, इसलिए इसे आंशिक भार के तहत मोड़ा जा सकता है। इलेक्ट्रो-हाइड्रोलिक सिंक्रोनस बेंडिंग मशीन की कार्य कुशलता दो से तीन टॉर्सियन एक्सिस सिंक्रोनस बेंडिंग मशीनों के बराबर हो सकती है।
संबंधित उत्पाद
 सीएनसी प्रेस ब्रेक झुकने मशीन का कार्य सिद्धांत और संरचना
सीएनसी प्रेस ब्रेक झुकने मशीन का कार्य सिद्धांत और संरचना- प्रेस ब्रेक झुकने वाली मशीन में मुआवजा प्रणाली क्यों जोड़ें
- प्रेस ब्रेक सीएनसी सिस्टम की तुलना और चयन
- सीएनसी शीट मेटल बेंडर के E21 सिस्टम को जानने के लिए 4 कदम
- सीएनसी शीट मेटल बेंडर के लिए विक्षेपण मुआवजा कैसे करें
- बेस्ट सेलिंग हाइड्रोलिक प्रेशर हाइड्रोलिक वर्कशॉप प्रेस हाइड्रोलिक प्रेस टन हाइड्रोलिक
- चीन 40 टन प्रेस ब्रेक
- हाइड्रोलिक पावर प्रेस मशीन के सुरक्षित संचालन नियम
- झुकने वाली मध्यम और मोटी प्लेटों का WILA कुशल समाधान
- सामान्य यांत्रिक विफलताएं और प्रेस ब्रेक झुकने वाली मशीनों का रखरखाव